



Description
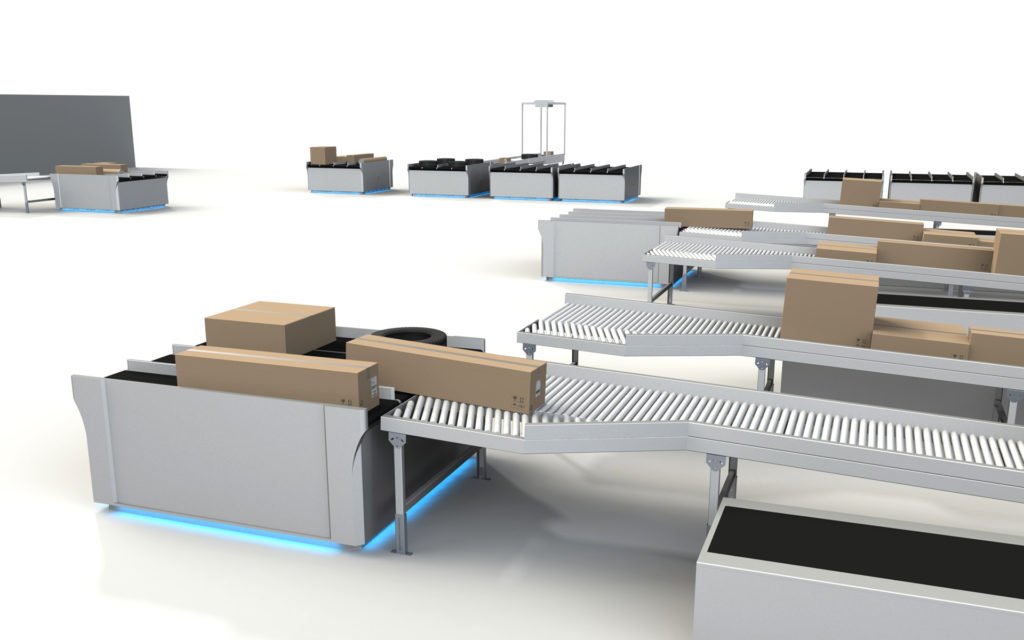
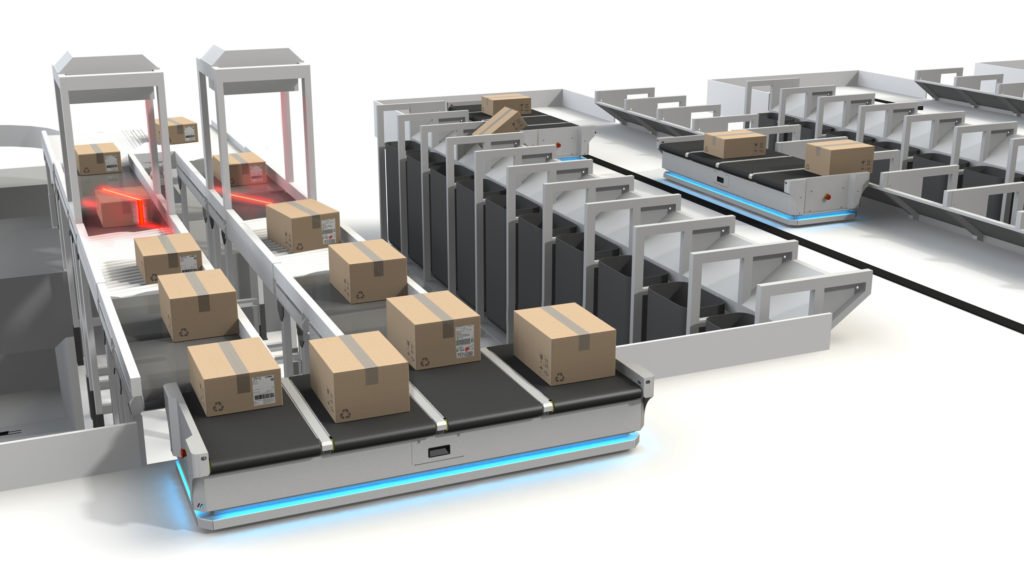
Il s’agit d’injecter (manuellement ou automatiquement) des objets à trier sur les robots comme on les injecterait sur un trieur de type cross-belt.
L’objet chargé est ensuite éjecté dynamiquement au niveau de sa sortie de destination (sacs, bacs, glacis, …) ou au niveau de postes de process intermédiaires (contrôles, personnalisation, buffer,…).
La taille et le nombre de convoyeurs embarqués sont adaptés à l’application pour optimiser les performances et le R.O.I.
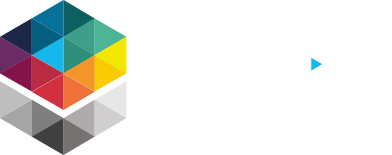
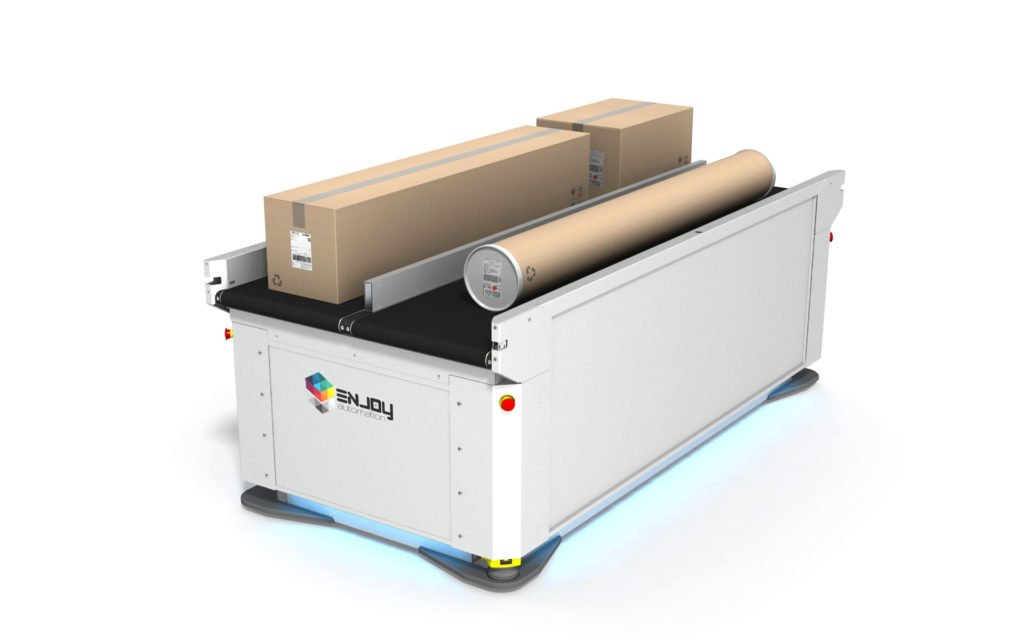
Nos robots mobiles pour le tri
XS-BELT

XL-BELT
{kind=link}
XXL-BELT

Les caractéristiques principales:
- Dimensions (longueur, largeur, hauteur) personnalisables
- Nombres de tapis/convoyeurs embarqués personnalisables
- Séparations entre les tapis fixes ou escamotables (pour s’adapter à la largeur des objets)
- Charges jusqu’à 100kg par objet
- Chargement statiques (mono ou multi objets)
- Déchargement statique ou dynamique
- Navigation intelligente et trajectoires optimisées (pas d’arrêts nécessaires pour les modifications de direction: virages, translation ,..)
Les applications
Tri petits objets
Tri objets encombrants