


Description
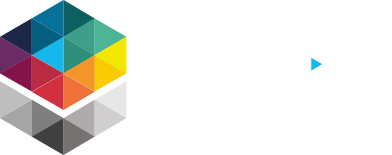
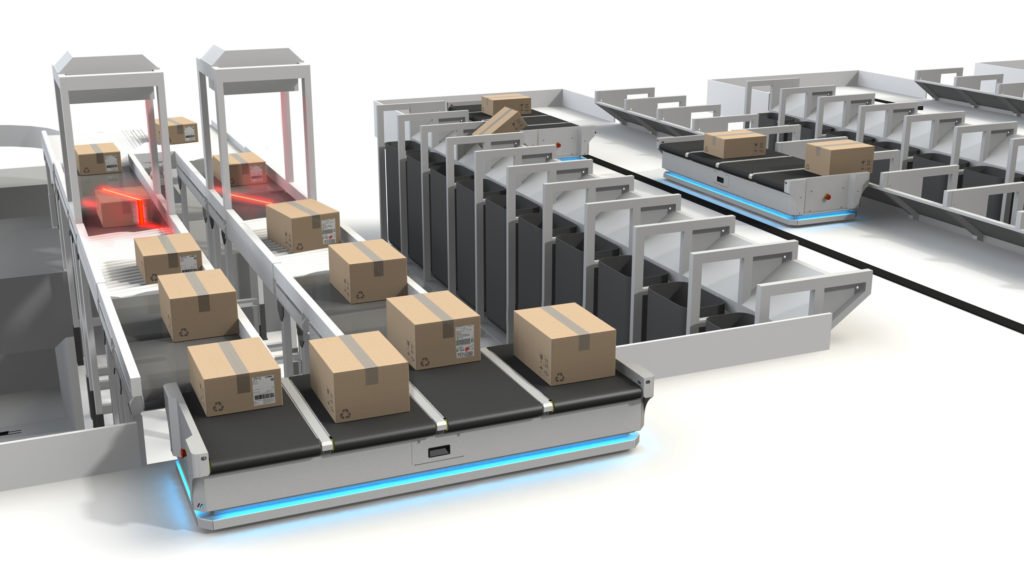
Il s’agit d’injecter (manuellement ou automatiquement) des objets à trier sur les robots comme on les injecterait sur un trieur de type cross-belt.
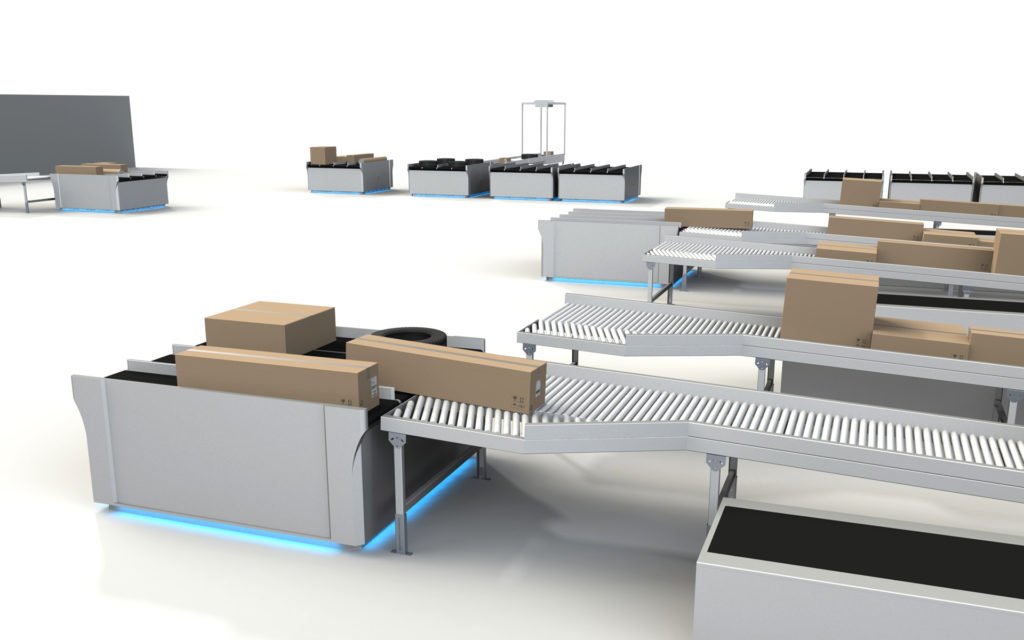
L’objet chargé est ensuite éjecté dynamiquement au niveau de sa sortie de destination (sacs, bacs, glacis, …) ou au niveau de postes de process intermédiaires (contrôles, personnalisation, buffer,…).
La taille et le nombre de convoyeurs embarqués sont adaptés à l’application pour optimiser les performances et le R.O.I.
Applications Tri
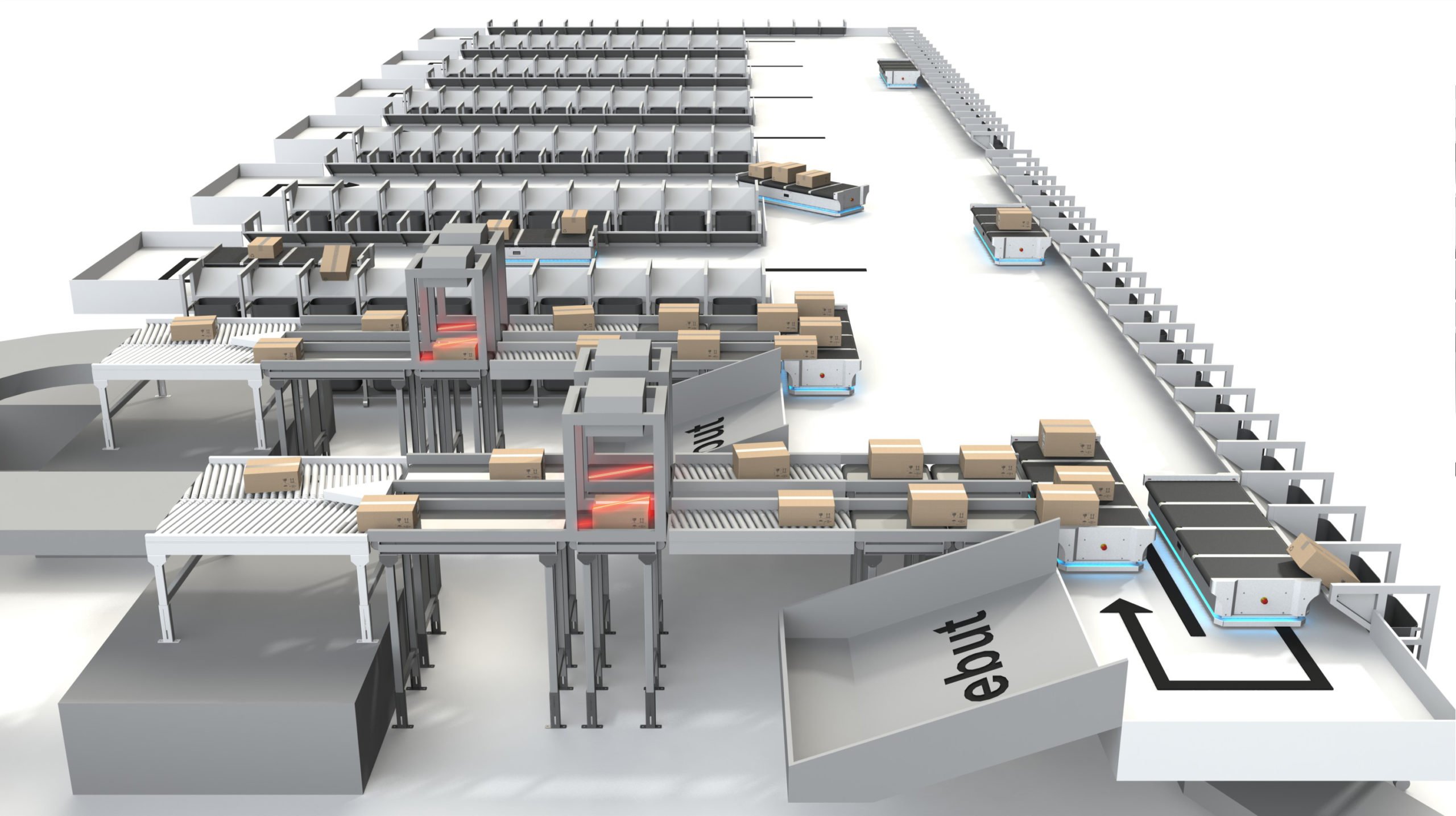
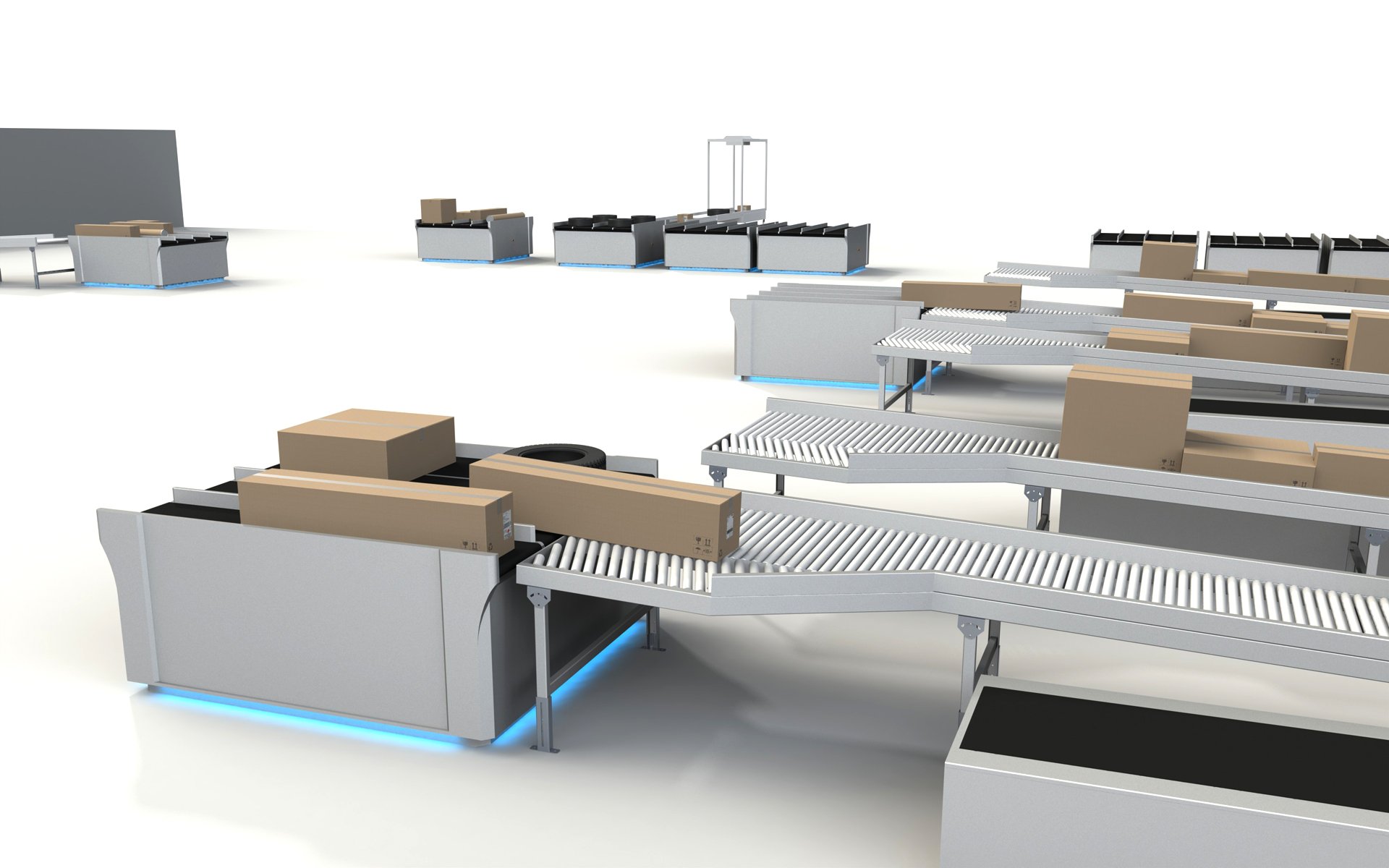
Petits objets
Objets encombrants
En action
L'avantage d'utiliser des robots mobiles
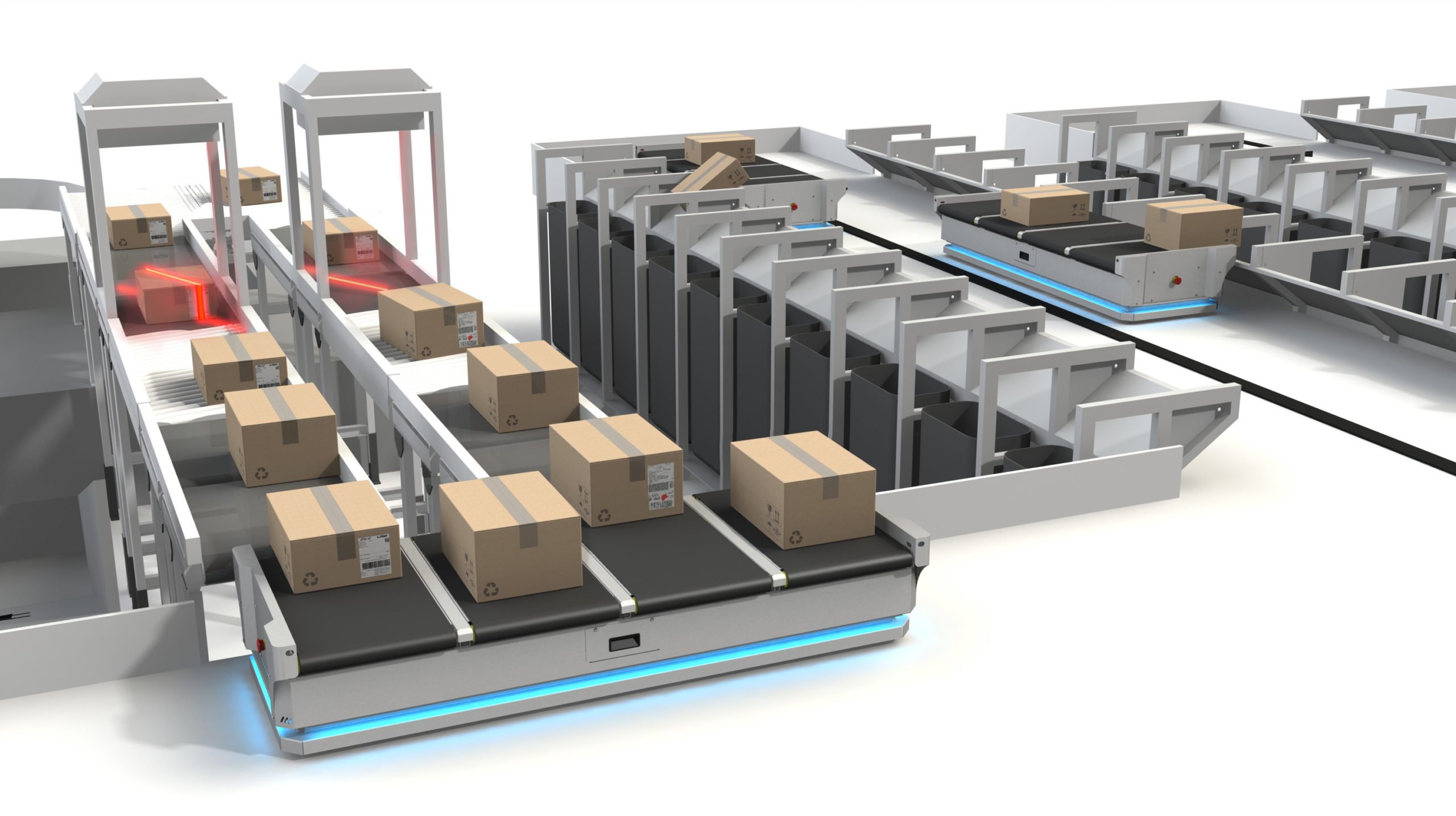
L’utilisation de robots mobiles pour des applications de tri permet notamment:
- de proposer des installations compactes et sans contraintes pour la circulations des autres flux
- de faire cohabiter aisément les hommes et les machines pour associer leurs compétences
- d’adapter le nombre de robots aux besoins de la production pour minimiser l’investissement initial (CAPEX)
Nos robots mobiles pour le TRI
XS-BELT

XL-BELT
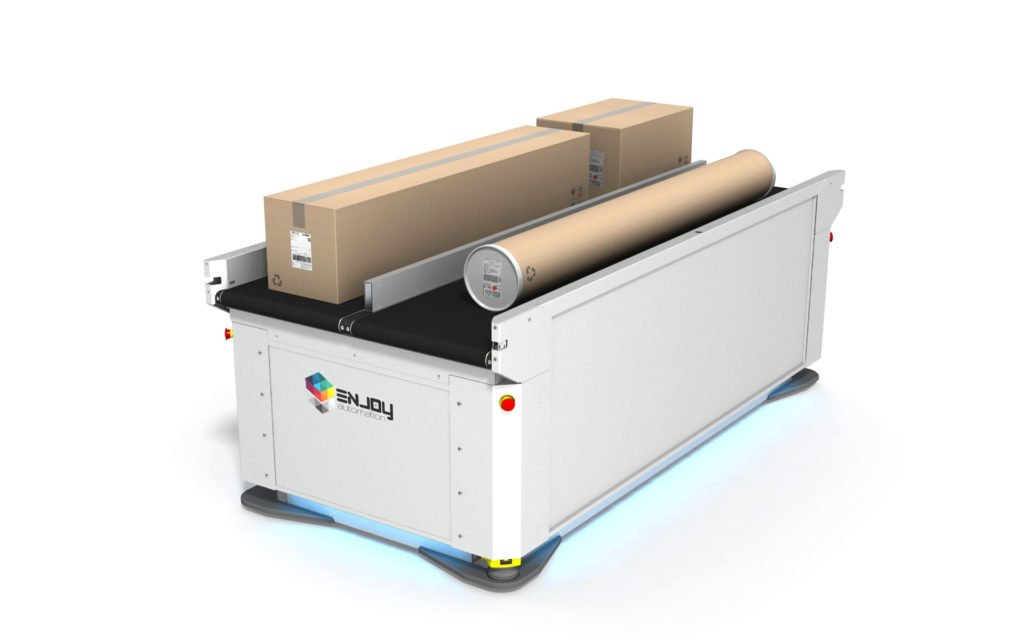
XXL-BELT
